SENSORES PARA AUTOMOCIÓN
Son sensores fiables y económicos. Se incluyen diodos emisores de infrarrojos (IREDs), sensores y montajes.

SENSORES DE CAUDAL DE AIRE
Contienen una estructura de película fina aislada térmicamente, que contiene elementos sensibles de temperatura y calor. La estructura de puente suministra una respuesta rápida al caudal de aire u otro gas que pase sobre el chip.
Contienen una estructura de película fina aislada térmicamente, que contiene elementos sensibles de temperatura y calor. La estructura de puente suministra una respuesta rápida al caudal de aire u otro gas que pase sobre el chip.

·SENSORES DE CORRIENTE
Monitorizan corriente continua o alterna. Los sensores de corriente digitales pueden hacer sonar una alarma, arrancar un motor, abrir una válvula o desconectar una bomba. La señal lineal duplica la forma de la onda de la corriente captada, y puede ser utilizada como un elemento de respuesta para controlar un motor o regular la cantidad de trabajo que realiza una máquina.

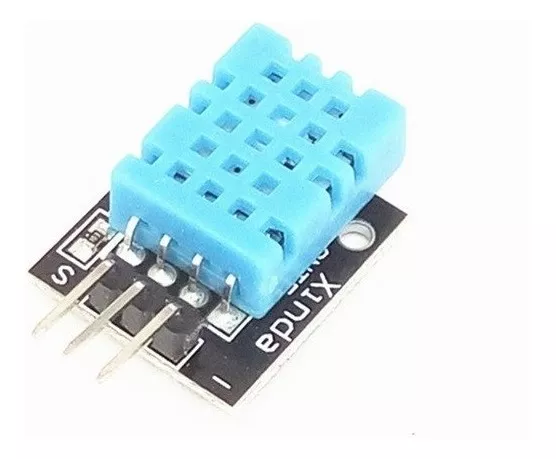
SENSORES DE HUMEDAD
Los sensores de humedad relativa/temperatura y humedad relativa están configurados con circuitos integrados que proporcionan una señal acondicionada. Estos sensores contienen un elemento sensible capacitivo en base de polímeros que interacciona con electrodos de platino.
SENSORES DE POSICIÓN DE ESTADO SOLIDO
Los sensores de
posición de estado sólido, detectores de proximidad de metales y de corriente, combinan fiabilidad, velocidad, durabilidad y compatibilidad con diversos circuitos electrónicos para aportar soluciones a las necesidades de aplicación.
posición de estado sólido, detectores de proximidad de metales y de corriente, combinan fiabilidad, velocidad, durabilidad y compatibilidad con diversos circuitos electrónicos para aportar soluciones a las necesidades de aplicación.

·SENSORES DE PRESIÓN Y FUERZA
Los sensores de presión son pequeños, fiables y de
bajo coste. Ofrecen una excelente repetitividad y una alta precisión y fiabilidad bajo condiciones ambientales variables.
bajo coste. Ofrecen una excelente repetitividad y una alta precisión y fiabilidad bajo condiciones ambientales variables.

·SENSORES DE TEMPERATURA
Los sensores de temperatura se catalogan en dos
series diferentes: TD y HEL/HRTS. Estos sensores
consisten en una fina película de resistencia variable
con la temperatura (RTD) y están calibrados por láser
para una mayor precisión e intercambiabilidad. Las
salidas lineales son estables y rápidas.

·SENSORES DE TURBIDEZ
Los sensores de turbidez aportan una información
rápida y práctica de la cantidad relativa de sólidos
suspendidos en el agua u otros líquidos. La medición
de la conductividad da una medición relativa de la
concentración iónica de un líquido dado.
rápida y práctica de la cantidad relativa de sólidos
suspendidos en el agua u otros líquidos. La medición
de la conductividad da una medición relativa de la
concentración iónica de un líquido dado.

·SENSORES MAGNÉTICOS
Los sensores magnéticos se basan en la tecnología magnetoresisitiva SSEC. Ofrecen una alta sensibilidad. Entre las aplicaciones se incluyen brújulas, control remoto de vehículos, detección de vehículos, realidad virtual, sensores de posición, sistemas de seguridad e instrumentación médica.

·SENSORES DE POSICIÓN
Su función es medir o detectar la posición de un determinado objeto en el espacio.

·SENSORES DE DESLIZAMIENTO
Este tipo de sensores se utiliza para indicar al robot con
que fuerza ha de coger un objeto para que este no se
rompa al aplicarle una fuerza excesiva, o por el contrario
que no se caiga de las pinzas del robot por no sujetarlo
debidamente.
que fuerza ha de coger un objeto para que este no se
rompa al aplicarle una fuerza excesiva, o por el contrario
que no se caiga de las pinzas del robot por no sujetarlo
debidamente.

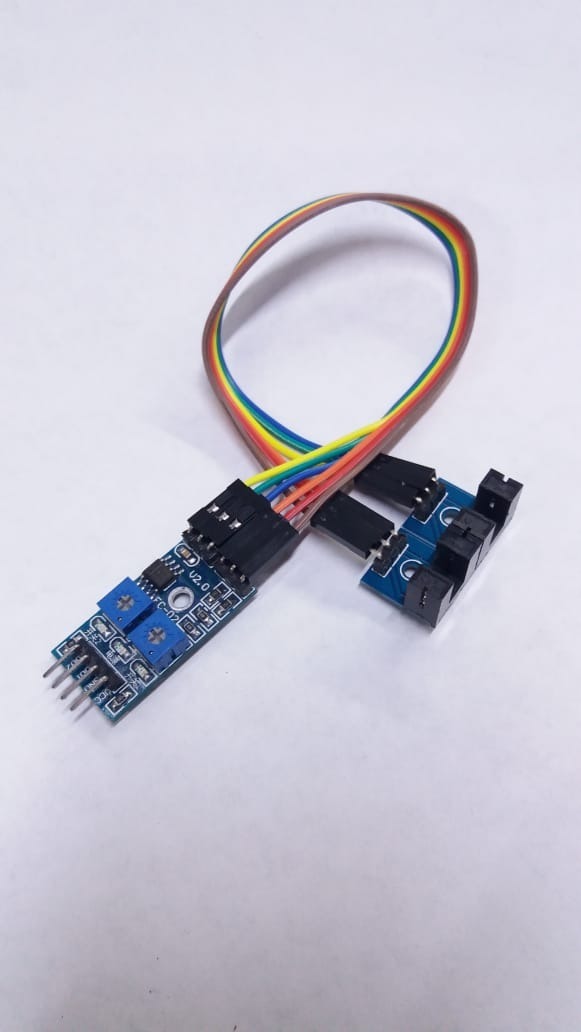
·SENSORES DE VELOCIDAD
Estos sensores pueden detectar la velocidad de un
objeto tanto sea lineal como angular, pero la aplicación
más conocida de este tipo de sensores es la medición
de la velocidad angular de los motores que mueven las
distintas partes del robot.
Estos sensores pueden detectar la velocidad de un
objeto tanto sea lineal como angular, pero la aplicación
más conocida de este tipo de sensores es la medición
de la velocidad angular de los motores que mueven las
distintas partes del robot.
·SENSORES DE ACELERACIÓN
Este tipo de sensores es muy importante, ya que la
información de la aceleración sufrida por un objeto o
parte de un robot es de vital importancia, ya que si se
produce una aceleración en un objeto, este experimenta
una fuerza que tiende ha hacer poner el objeto en
movimiento.

información de la aceleración sufrida por un objeto o
parte de un robot es de vital importancia, ya que si se
produce una aceleración en un objeto, este experimenta
una fuerza que tiende ha hacer poner el objeto en
movimiento.


No hay comentarios:
Publicar un comentario